Дрон
Дрон Pelikan 3.2 - летательный аппарат не складной конструкции, способный записывать видео с разрешением 1080P 60FPS с 10x кратным зумом и переносить груз весом не более 1,4 кг.
Максимальная скорость полета Pelikan 3.2 - 70 км/ч а максимальное время полёта - 1 час.
Данный квадрокоптер способен выполнять полеты в ручном, полуавтоматическом и автоматическом режиме. В комплекте предусмотрен пульт управления с встроенным экраном на который выводится картинка с камеры tarot pepper TL10A00. Данная камера может вращаться на 480 градусов вдоль поперечной оси. Для контроля курса предусмотрена курсовая камера для полета в режиме FPV. Картинка с этой камеры передается по радиоканалу на монитор lilput.
 Результат, полученный во время испытаний в безветренной среде и при постоянных скоростях 25 км/ч (15,5 мили/ч). Эти значения приведены исключительно в справочных целях.
Результат, полученный во время испытаний в безветренной среде и при постоянных скоростях 25 км/ч (15,5 мили/ч). Эти значения приведены исключительно в справочных целях.
Комплектация
- Квадрокоптер COEX Clever 3, 1 шт
- Пуль управления FlYSKY, 1 шт
- Пульт управления Taranis QX7, 1 шт
- Камера на подвесе Tarrot, 1 шт
- Блок питания FKS308HSC, 1 шт
- Блок питания LJH-01262000
- Пульт управления COEX
- Зарядное устройство Ultra Power
- Запасной аккумулятор для квадрокоптера COEX Pelican
- Аккумулятор для пульта 3S1P
- Видеоприёмник FOXTECHFPV.COM с монитором LILLIPUT
- Квадрокоптер COEX Pelican
Технические характеристики
| Технические характеристики | Наличие |
|---|---|
| Максимальная масса полезной нагрузки | 2 кг |
| Максимальное время полета | 60 минут |
| Максимальная скорость | 70 км/ч |
| Максимальное расстояние полета | 20 км |
| Максимальная допустимая скорость ветра при полете | 12 м/с |
| Возможность установить на подвесе тепловизионную и мультиспектральную камеру | наличие |
| Регулятор скорости (ESC) | 4 шт. |
| Допустимое максимальное напряжение регулятора скорости (ESC) | 25,2 В |
| Полетный контроллер | наличие |
| Степени свободы полетного контроллера (DOF) | 10 |
| Возможность управления полётным контроллером по протоколу MAVLink | наличие |
| Возможность получения полетных показаний телеметрии от полётного контроллера на бортовой компьютер | наличие |
| Возможность формирования миссии на бортовом компьютере и передача на полётный контроллер | наличие |
| Электромотор | 4 шт. |
| Диаметр между осями моторов | 700 мм |
| Мощность электродвигателя | 900 Вт |
| Пропеллер | 4 шт. |
| Диаметр пропеллеров | 457 мм |
| Рама | наличие |
| Камера и тепловизор на гиростабилизированном подвесе | наличие |
| Разрешение камеры | ? 12 Мп ? |
| Функция картинка-в-картинке, термальное и визуальное изображение | наличие |
| Система цифровой передачи видео в формате HD | наличие |
| Максимальное расстояние передачи HD-видео | 2 км |
| Подключение видеовыхода камеры полезной нагрузки коптера по HDMI к системе передачи цифрового видео | наличие |
| Аккумулятор | 1 шт. |
| Номинальная емкость аккумулятора | 22000 mAh |
| Номинальное напряжение аккумулятора | 22,2 В |
| Допустимое количество циклов зарядки-разрядки аккумулятора | 200 |
| Зарядное устройство для АКБ | наличие |
| Мощность зарядного устройства для АКБ | 600 Вт |
| Пульт управления с планшетным компьютером в едином корпусе | наличие |
| Диагональ планшетного компьютера | 20 см |
| Количество каналов пульта радиоуправления | 8 |
| Программное обеспечение для наземной станции управления QGroundControl | наличие |
| HDMI-видеовыход на пульте управления | наличие |
Подготовка к первому запуску
Назначение кнопок и элементов
 Пульт Taranis используется для управление камерой tarot pepper TL10A00. Левый stick отвечает за наклоны камеры вверх и вниз, правый стик отвечает за повороты камеры влево и вправо.
Пульт Taranis используется для управление камерой tarot pepper TL10A00. Левый stick отвечает за наклоны камеры вверх и вниз, правый стик отвечает за повороты камеры влево и вправо.
 Пульт COEX используется для управления и настройки квадрокоптера.
Пульт COEX используется для управления и настройки квадрокоптера.
- SA – переключение полетных режимов
sa↑ - Stabilize mode
sa- - Altitude mode
sa↓ - Position mode
- SB - не задействован
- SC - Управление грузоотсеком
sc↑ - Закрепить грузоотсек
sc↓ - открепить грузоотсек
- VrA - не задействован
Подготовка пульта
Зарядите пульт. Используйте представленное в комплекте зарядное устройство, чтобы полностью зарядить пульт перед использованием. Подсоедините зарядное устроство к пульту. Чтобы зарядка началась - включите пульт и планшет.
ВАЖНО! Для правильной зарядки встроенного планшета - пульт в момент зарядки должен быть ВКЛЮЧЕН!
Чтобы включить пульт, нажмите и удерживайте кнопку  .
Планшет включается кнопкой вверху пульта.
Проведите по планшету слайд вверх для разблокировки. Дождитесь загрузки планшета.
.
Планшет включается кнопкой вверху пульта.
Проведите по планшету слайд вверх для разблокировки. Дождитесь загрузки планшета.
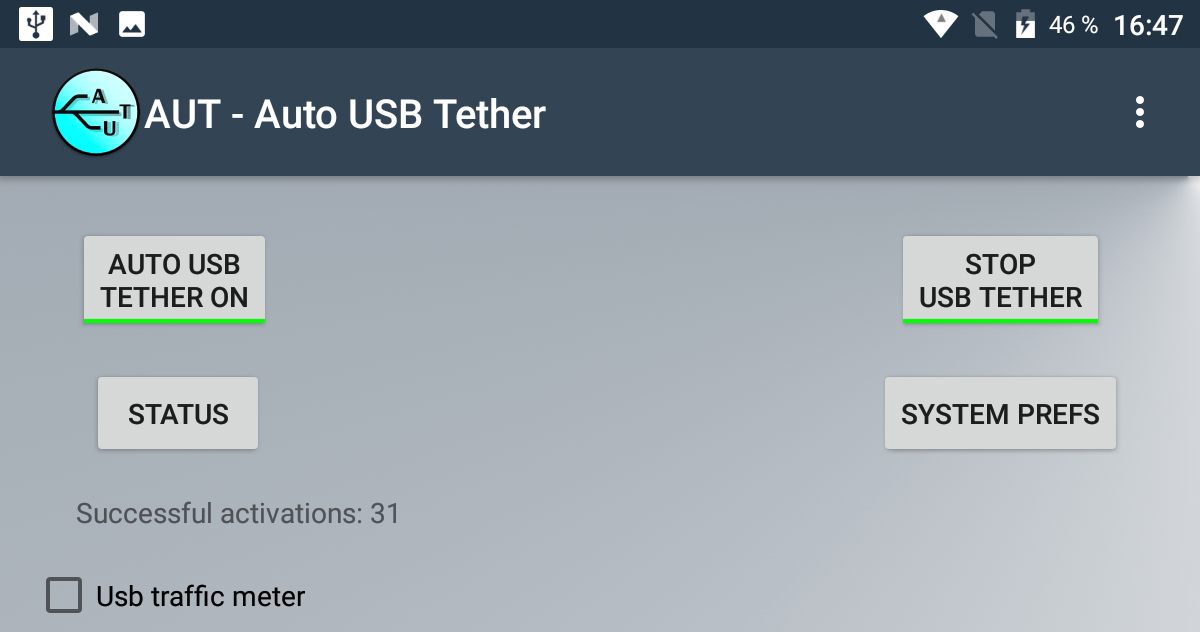
На рабочем столе планшета запустите приложение AUT-Auto usb Tether.
Убедитесь, что в приложении включены кнопки AUTO USB TETHER ON и STOP USB TETHER. Они должны быть подсвечены желтым цветом.
 Следующим шагом запустите на рабочем столе приложение QGroundControl.
Следующим шагом запустите на рабочем столе приложение QGroundControl.
В зависимости от готовности коптера на экране будет отображено ожидание соединения с квадрокоптером или будут загружены параметры и отобразится картинка.
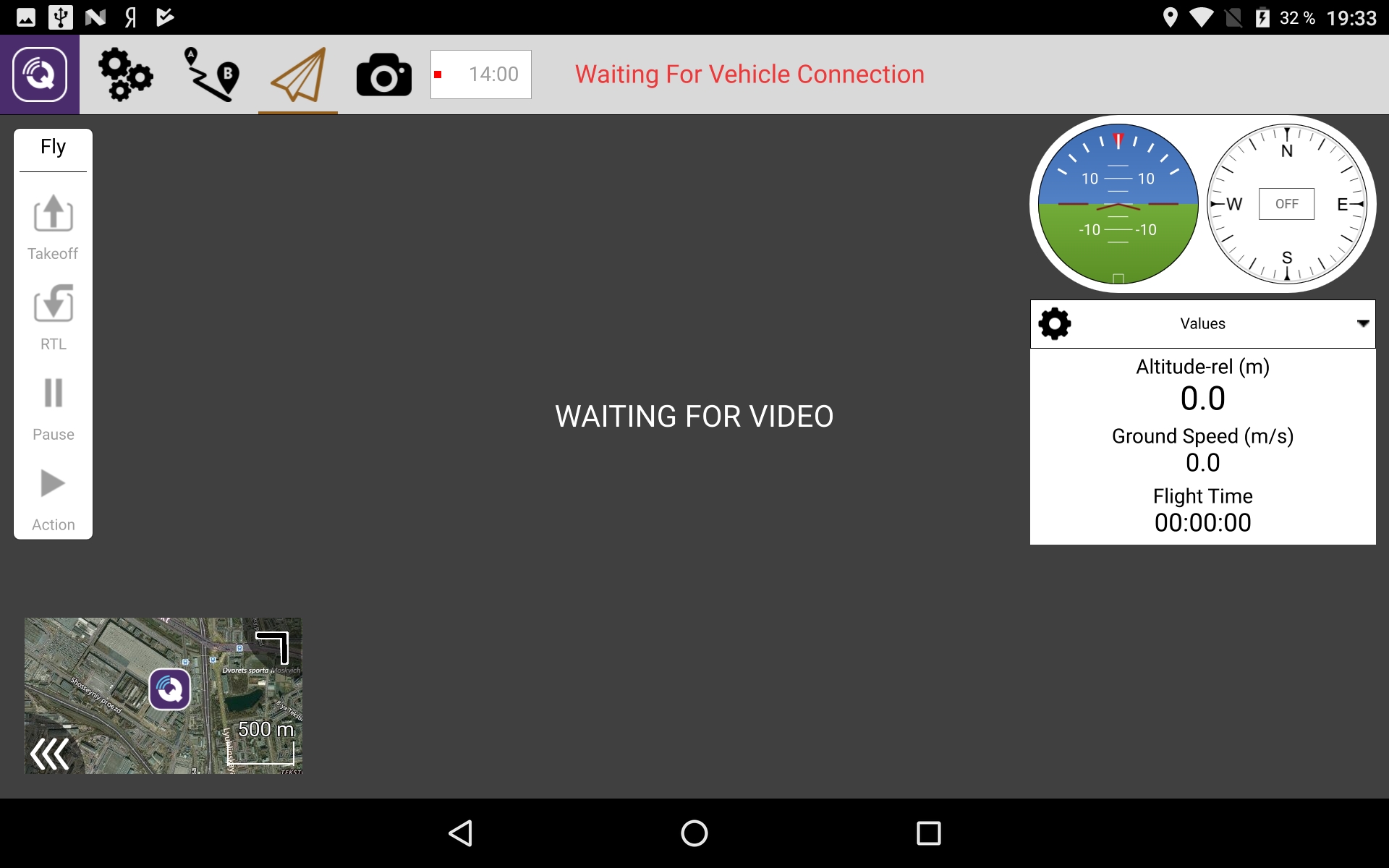
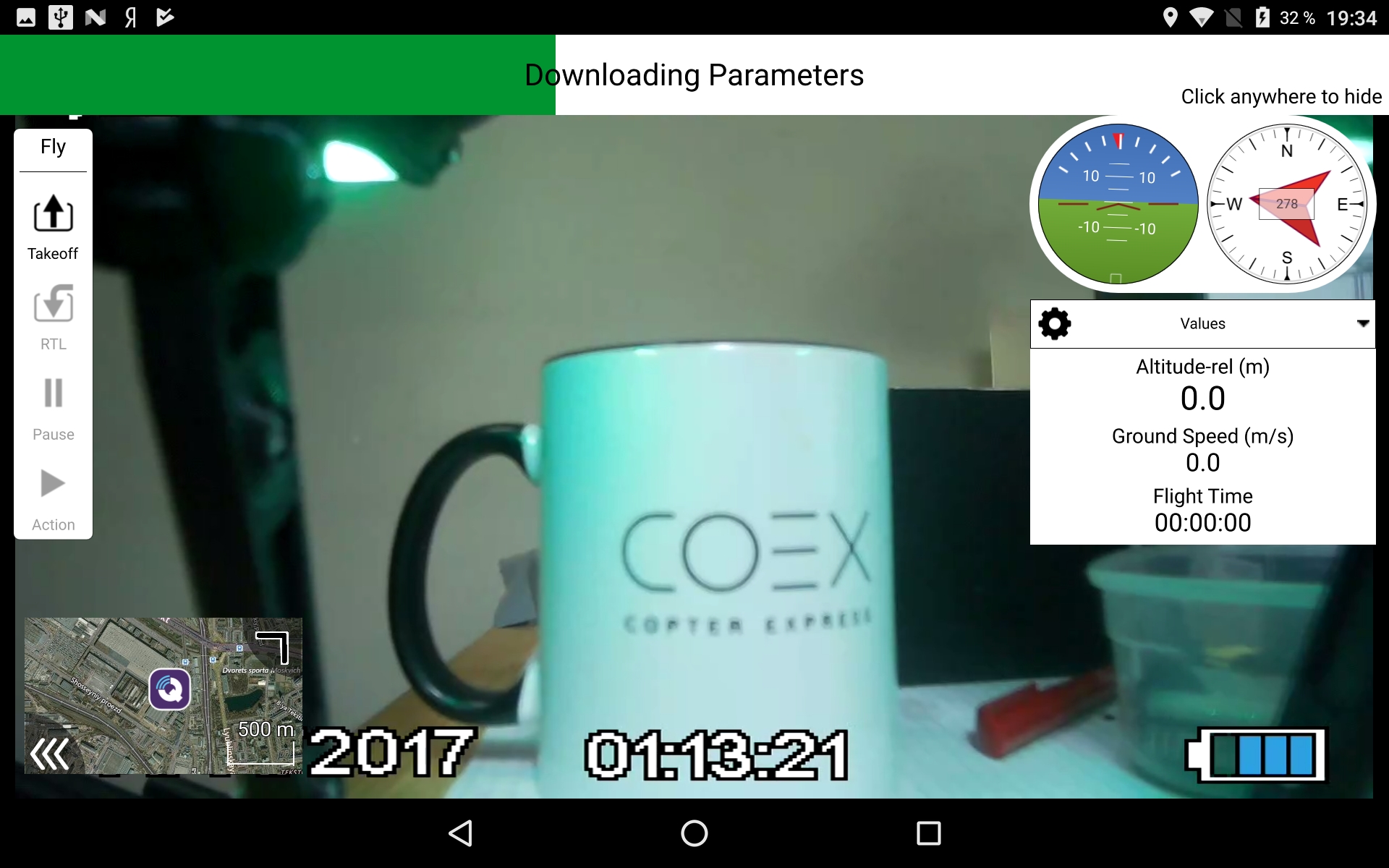

Более исчерпывающая информация по работе с приложением QGroundControl доступно на официальном сайте разработчика: http://qgroundcontrol.com/
Подготовка аккумулятора
Зарядите аккумуляторы. Используйте представленное в комплекте зарядное устройство, чтобы полностью зарядить аккумулятор перед использованием. Подсоедините аккумулятор к зарядному устройству через балансовый и силовой кабель. Время зарядки аккумулятора можно наблюдать на зарядном устройстве. Прочтите инструкцию зарядного устройства перед эксплуатацией.
Подготовка квадрокоптера
-
Установите квадрокоптер на ровном месте на земле.
Не рекомендуется устанавливать дрон на шаткие нестабильные поверхности.
-
Убедитесь, что пропеллеры на дроне установлены верно, согласно схеме. Разнесите лопасти пропеллеров в стороны. Произведите визуальный осмотр дрона на предмет деффектов.
![]()
Подготовка полезной нагрузки
Установка камеры
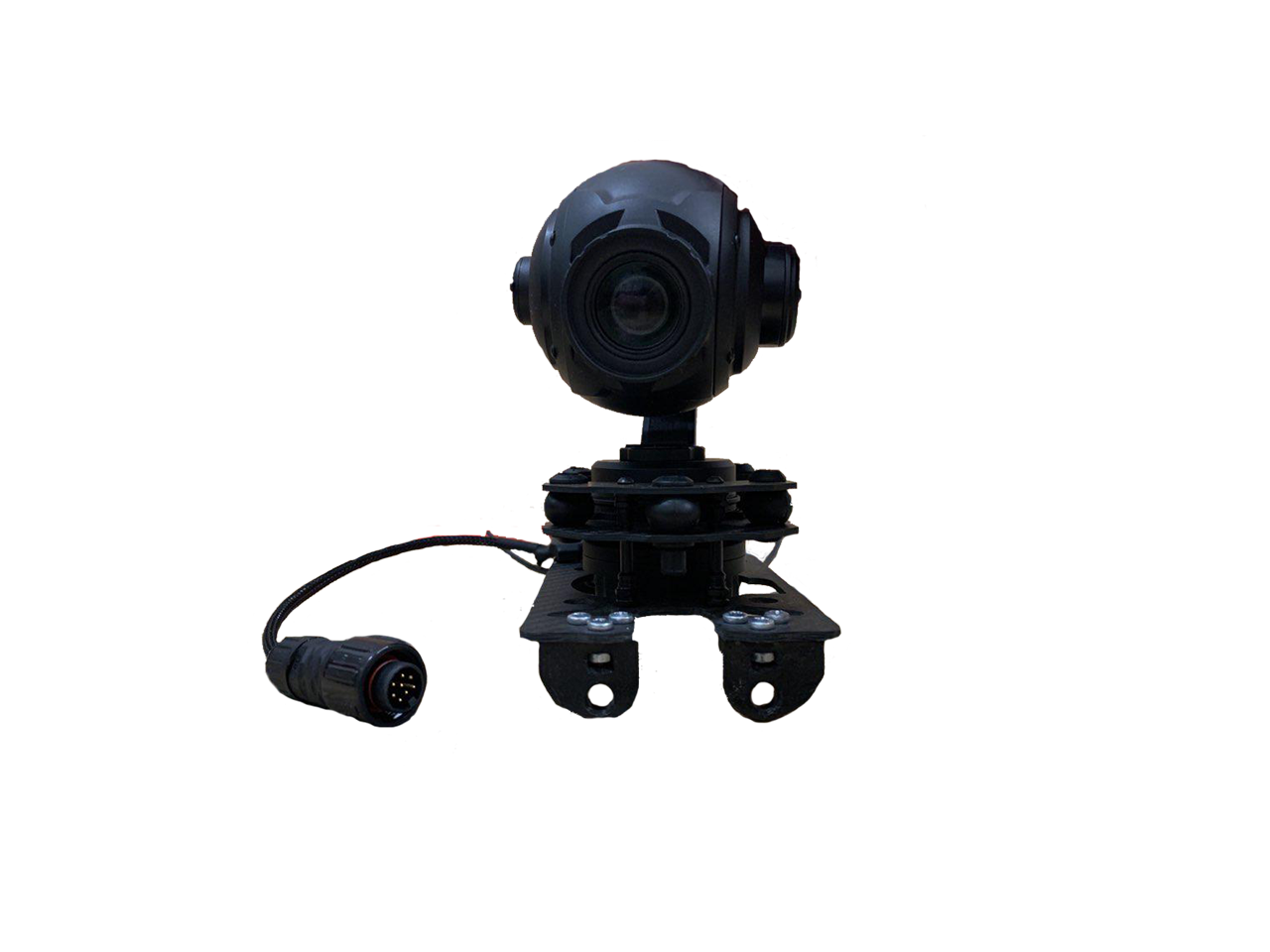
- Установите квадрокоптер на ровную поверхность, например, стол.
- Открутите барашек крепления быстросъема.
- Возьмите камеру и оттягивая барашек быстросъема на себя вставьте проушины крепления камеры в быстросъем. Закрутите барашек быстросъема.
- Подсоедините и закрутите коннектор видеокамеры как показано на фото.

Установка грузоотсека
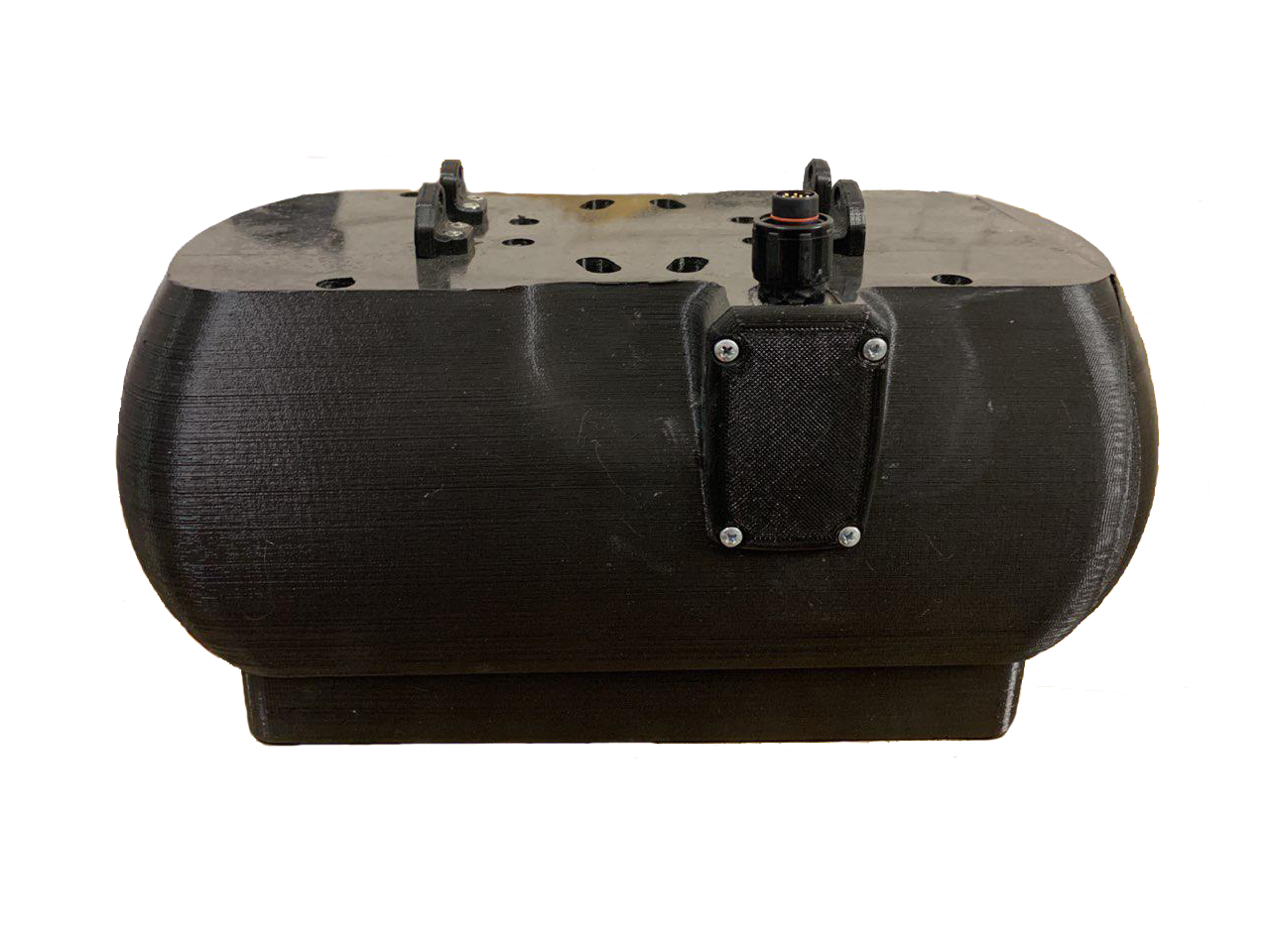
- Установите квадрокоптер на ровную поверхность, например, стол.
- Открутите барашек крепления быстросъема.
- Возьмите грузоотсек и оттягивая барашек быстросъема на себя вставьте проушины крепления грузоотсека в быстросъем. Так же при вставке проушин необходимо вставить и коннектор, следите за этим. Закрутите барашек быстросъема.
Калибровка компаса (магнитометра)
- Включаем квадрокоптер, соединив клемы питания.
- Открываем QGroundControl. Заходим в меню Sensors > Compass.
- Выбираем Autopilot Orientation: ROTATION_YAW_180. Кликаем OK.
Выбираем ориентацию квадрокоптера как на картинке и ждем, когда полетный контроллер определит положение, появится желтая рамка и надпись "Rotate". Вращаем квадрокоптер как на картинке до появления зеленой рамки - квадрокоптер откалибровал компас по данной оси.
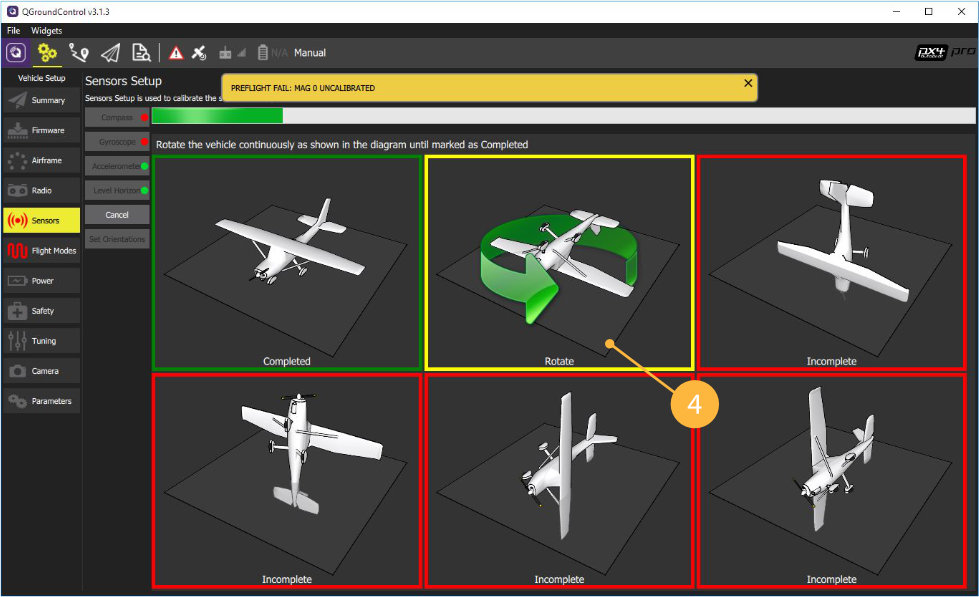
после проведения калибровки квадрокоптер необходимо перезагрузить.
Полёт
Перед запуском квадрокоптера необходимо выполнить ряд ручных предполетных проверок. Для взлета в новой местности рекомендуется проводить калибровку компаса (датчика магнитометра).
при включении коптера необходимо убедиться в правильном функционировании всех систем, отвечающих за полет:
-
Проверка конструктивных элементов
-
моторы на лучах и сами лучи не прокручивается, моторы закреплены надежно, люфта при попытке отклонить мотор от продольной оси нет
-
пропеллеры закреплены надежно, люфта нет
- весь визуально наблюдаемый крепеж находится на своих местах, не раскручен
- антенны находятся на месте, закручены надежно
- стойка GPS не прокручивается
- корпус коптера не имеет трещин и сколов
- карбоновые трубки лучей гладкие, не имеют трещин
- проверка arm'a при малом газе
проверка arming'a при газу, установленном в минимальное значение необходимо произвести арм коптера, сделать это можно с пульта или же через QGC. - корректность переключения полетных режимов
поочередно переключаем режимы на пульте и проверяем корректность их отображения в QGC.
взлет в ручном режиме
Необходимо вынести квадрокоптер на открытую, горизонтальную и ровную площадку размерами не менее 5х5 метров, свободную от посторонних предметов, пыли, людей, животных, без нависающих над местом взлета козырьков, навесов, проводов.
Установите заряженный аккумулятор в отсек для батареи и соедините клемы питания.
Подождите 30 секунд для успешной инициализации полетного контроллера.
Для того, чтобы запустить моторы необходимо на пульте COEX дать команду arming. Команда arming запускается при наклоне левого стика вниз и вправо.
Для того, чтобы остановить моторы необходимо дать команду disarming. Команда disarming запускается при наклоне левого стика вниз и влево.


1. Режим stabilize
Переводим переключатель полетных режимов SA в положение stabilized, производим ARM и постепенно увеличиваем тягу пока квадрокоптер не начнет отрываться от земли.
поднимаемся на высоту 2-3 метров и плавными и аккуратными движениями отклоняем правый стик на 1-5 градусов в каждом из направлений, при адекватной и предсказуемой реакции необходимо посадить квадрокоптер: плавно опускаем ручку газа, пока квадрокоптер не начнет снижаться, после касания шасси земли опускаем ручку газа, пока шасси не окажется полностью на земле, после чего опускаем ручку газа до нуля, дизармим.
если квадрокоптер в воздухе ведет себя неестественно, осциллирует- следует немедленно его посадить, после чего проверить консоль QGC на наличие ошибок.
2. Режим удержание высоты (altitude)
Переводим переключатель полетного режима SA в положение altitude. В этом режиме квадрокоптер удерживает высоту при положении ручку газа в среднем положении, при положении ручки ниже среднего положения он снижается с заданной заранее скоростью, при положении ручки газа выше среднего положения квадрокоптер набирает высоту с заданной программно скоростью.
Если при следующих манипуляциях квадрокоптер начнет неконтролируемо набирать высоту - следует перевести ручку газа в среднее положение одновременно с переключением полетного режима в положение STABILIZED и немедленно посадить квадрокоптер.
Производим arming, поднимаем ручку газа до среднего положения, после чего аккуратно поднимаем ее выше, пока квадрокоптер не начнет набирать высоту, поднимаемся до 2-3 метров, возвращаем ручку газа в среднее положение, если квадрокоптер удерживает высоту, не снижается и не поднимается более чем на 1 метр при неподвижной ручке газа- опускаем ручку пока квадрокоптер не начнет снижаться, после касания шасси земли опускаем ручку газа до нуля, дизармим.
если квадрокоптер в воздухе ведет себя неестественно, осциллирует- следует немедленно его посадить, после чего проверить консоль QGC на наличие ошибок и проверить элементы шасси, корпуса, пропеллеров на надежность крепления.
2. Режим удержание положения (position)
Переводим переключатель полетного режима SA в положение position, в этом режиме квадрокоптер удерживает высоту и точку в пространстве при положении ручку газа в среднем положении. При положении ручки ниже среднего положения он снижается с заданной заранее скоростью. При положении ручки газа выше среднего положения квадрокоптер набирает высоту с заданной программно скоростью.
Если при следующих манипуляциях квадрокоптер начнет неконтролируемо набирать высоту или быстро ускоряться и двигаться в сторону, куда его не направляют командами с пульта - следует перевести ручку газа в среднее положение одновременно с переключением полетного режима в положение stabilized и немедленно посадить.
Производим arming, поднимаем ручку газа до среднего положения, после чего аккуратно поднимаем ее дальше, пока квадрокоптер не начнет набирать высоту, поднимаемся до 2-3 метров, возвращаем ручку газа в среднее положение, если квадрокоптер удерживает высоту, не снижается и не поднимается более чем на 1 метр - плавными и аккуратными движениями отклоняем правый стик на 1-5 градусов в каждом из направлений.
Чтобы посадить квадрокоптер в режиме position плавно опускаем ручку газа, пока квадрокоптер не начнет снижаться, после касания шасси земли опускаем ручку газа до нуля,даем команду disarming.
Если квадрокоптер в воздухе ведет себя неестественно, осциллирует- следует немедленно его посадить, после чего проверить консоль QGC на наличие ошибок.
Возможные ошибки
Ошибка mag sensors inconsist
При наличии ошибки “mag sensors inconsistent” необходимо провести калибровку магнитометра: В QGC в верхней строке меню необходимо выбрать “parameters” (меню с изображением шестеренок), далее выбрать подменю “compass” и следовать инструкциям на экране. квадрокоптер необходимо вращать с скоростью 1 оборот в 5 секунд, стараясь удерживать квадрокоптер в заданной ориентации, предпочтительно вращаться с коптером стоя, нежели вращать квадрокоптер в руках, стоя на месте. сперва берем квадрокоптер и удерживаем его в одной из указанных на экране ориентаций, после того ,как ориентация сменит окружение на желтый цвет- начинаем вращать квадрокоптер вокруг своей оси, после того как окружение сменится на зеленый- переходим к следующей ориентации. после калибровки необходимо дождаться записи параметров калибровки, обычно это не занимает более 10 секунд. после проведения всех калибровок квадрокоптер необходимо перезагрузить.
Ошибка high imu accel bias
При наличии ошибки “high imu accel bias” необходимо подождать минут 10-15. Если ошибка не пропала, необходимо провести калибровку акселерометра: в QGC в верхней строке меню необходимо выбрать “parameters”, далее выбрать подменю “accelerometer” и следовать инструкциям на экране, при этом необходимо учитывать, что в каждой ориентации квадрокоптер должен находиться неподвижно, для этого можно использовать вертикальную стену как опору. после включения калибровки необходимо установить квадрокоптер в одну из указанных ориентаций и удерживать, пока окружение не сменится на желтый, а затем на зеленый цвет, после калибровки необходимо дождаться записи параметров калибровки, обычно это не занимает более 10 секунд.