COEX DuoCam

"COEX DuoCam" - это программно-аппаратный комплекс, позволяющий получать комбинированное визуально-тепловизионное изображение.
В качестве источника визуальной картинки теоретически можно использовать любую камерую, имеющую CSI или HDMI-выход.
В качестве источника тепловизионной картинки можно использовать тепловизоры Seek Compact или Seek Compact Pro.
В качестве платформы для запуска обрабатывающего софта рекомендуется использовать одноплатный компьютер Raspberry Pi 4B.
Подключение устройств
Тепловизор подключается в один из портов USB 3.0 на RPi4. Во второй USB 3.0-порт подключается Wi-Fi адаптер для осуществления связи с наземной станцией.
Визуальная камера подключается в CSI порт напрямую или через HDMI-CSI-конвертер.
В порт USB 2.0 следует подключить USB-flash устройство, на которое будет производиться сохранение фото и видеофайлов.
Принцип работы
Программная часть осуществляет наложение тепловизионной картинки на визуальную. С помощью конфигурационного файла или виджета управления свойствами камеры в QGroundControl можно изменять результирующее изображение.
Выбор модели тепловизора
Первоначально надо определиться, какая у вас можель тепловизора (простая или Pro) и выставить соответствующую настройку в конфиг-файле (enable: yes у seek_thermal_pro или seek_thermal в разделе thermal_camera_models. Важно не забыть выставить enable: no у камеры, которую не предполагается использовать)
Управление наложением
При включенном визуальном (show_visual: yes) и термическом (show_thermal: yes) изображениях, термическое будет налагаться на визуальное в регион, заданный в свойстве overlay_thermal_on_visual (начальная точка с координатами (x_start, y_start), ширина региона - thermal_region_width, высота - thermal_region_height).
Если отключить визуальное изображение (show_visual: no), то термическое развернется на весь экран.
Если отключить термическое (show_thermal: no), то будет транслироваться только визуальное.
Если отключить оба - изображение перестанет транслироваться.
Центровка
Для центровки результирующего изображения (из-за физического сдвига объективов камер термическое будет сдвинутого относительно центра визуального) следует использовать свойства раздела final_frame_cropping. Принцип аналогичен предыдущему разделу.
Детекторы контуров (edge detectors)
Для облегчения понимания термического изображения, есть возможность включения наложения на него соответствующих контуров визуального изображения. В программе реализована поддержва двух алгоритмов детектирования контуров: Sobel и Canny. В соответствующих разделах конфига (apply_sobel и apply_canny) можно поэкспериментировать с некоторыми свойствами детекторов.
Колоризация
Для большей наглядности, тепловизионное изображение можно колорифицировать. Для этого необходимо выставить свойство apply_colormap: yes.
Конкретную схему колорификации можно выбрать из списка, указав порядковый номер схемы в свойстве colormap.
Свойства транслируемого видео и сохраняемых файлов
Свойства транслируемого видео можно измкенять в разделе output_video. Делать это стоит с четким пониманием того, что делаешь - неправильные настройки могут сломать трансляцию. Например, разрешение видео должно совпадать с настройками gstreamer'а, который осуществляет последующее кодирование.
Для настройки сохраняемого на флеш-накопитель видео следует пользоваться группой свойств encode_video.
Каталоги для сохранения фото и видеофайлов можно указать в свойствах path_to_save.
Настройки дополнительной отображаемой информации
Скрывать\показывать частоту кадров в секунду визуального и термического изображений можно при помощи свойства show_fps.
Показывать\скрывать перекрестие с температурой центрального пикселя можно при помощи свойства draw_temp.
Подстройка температуры
В зависимости от используемого тепловизора, может потребоваться корректировка температурного диапазона. В секции temperature_calibration Доступны две настройки:
- Сдвиг (
offset) - линейный сдвиг температурного диапазон на указанное число. - Масштаб (
scale) - пропорциональное изменение шкалы.
Выравнивание градиента температуры от центра к краям
Если на тепловизионном изображении наблюдается "рамка", вызванная увеличением определяемой температуры к краям, то следует применить выравнивающий фильтр (виньетирование). Настройки располагаются в секции vignette:
enable- включить-выключить наложение фильтраshow_center- показать точку "центра" для отладки ее положенияcenter_x- X-координата "центра"center_y- Y-координата "центра"max_decrement_relative- максимальное уменьшение температуры к краям
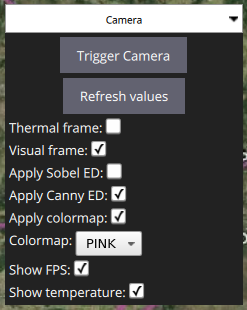
Виджет управления камерой для QGroundControl
Где взять
QGC c необходимый функционалом для управления "COEX DuoCam" можно скачать в нашем репозитории. Скачивать следует тот релиз, в названии которого присутствует слово duocam с максимальным порядковым номером.
Как использовать
При открытии виджета QGC пошлет MAVLink-сообщения с запросом текущих значений свойств. Необходимо дождаться, пока они все до конца загрузятся. Если загрузка не завершается в течение минуты, необходимо нажать кнопку "Refresh values".
При изменении значений свойств QGC осуществляет коммуникацию с DuoCam посредством протокола MAVLink, поэтому нет смысла очень часто нажимать контролы - наоборот, после нажатия следует дождаться изменения картинки и только потом переходить к следующему свойству.
Подробнее об архитектуре DuoCam и программе duocam-mavlink.
Конфигурационный файл
Для более глубокой настройки DuoCam можно использовать конфигурационный файл.
Как добраться
Для редактирования конфигурационного файла необходимо извлечь microSD-карту из RPi4, вставить в кард-ридер своего компьютера (от операционной системы требуется возможность читать файловую систему ext4), открыть файл по адресу <microSD>/etc/duocam/camera.yaml.
Также можно зайти по ssh на работающую RPi4 и отредактировать конфигурационный файл внутри системы по тому же пути.
Образец конфигурационного файла
show_visual: yes
show_thermal: yes
flip_thermal: no
apply_sobel:
enable: yes
sobel_scale: 3
sobel_delta: 0
apply_canny: no
draw_temp: yes
output_video:
device: /dev/video1
width: 1280
height: 720
bytes_per_pixel: 3
framerate: 20
path_to_save_photos: /media/usb0/
path_to_save_videos: /media/usb0/
encode_video:
width: 720
height: 480
framerate: 10
thermal_camera_models:
seek_thermal_pro:
enable: no
sensor_resolution:
width: 320
height: 240
overlay_thermal_on_visual:
# These values are for GitUp3
x_start: 282
y_start: 102
thermal_region_width: 600
thermal_region_height: 400
transparency: 0.3
# These values are for Raspicam
# x_start: 425
# y_start: 155
# thermal_region_width: 900
# thermal_region_height: 600
final_frame_cropping:
enable: yes
x_start: 0
y_start: 0
width: 1160
height: 610
seek_thermal:
enable: yes
sensor_resolution:
width: 206
height: 156
overlay_thermal_on_visual:
x_start: 282
y_start: 102
thermal_region_width: 600
thermal_region_height: 400
transparency: 0.3
final_frame_cropping:
enable: yes
x_start: 0
y_start: 0
width: 1160
height: 610
# Colormaps are taken from: https://docs.opencv.org/2.4/modules/contrib/doc/facerec/colormaps.html
# COLORMAP_AUTUMN = 0,
# COLORMAP_BONE = 1,
# COLORMAP_JET = 2,
# COLORMAP_WINTER = 3,
# COLORMAP_RAINBOW = 4,
# COLORMAP_OCEAN = 5,
# COLORMAP_SUMMER = 6,
# COLORMAP_SPRING = 7,
# COLORMAP_COOL = 8,
# COLORMAP_HSV = 9,
# COLORMAP_PINK = 10,
# COLORMAP_HOT = 11
apply_colormap:
enable: yes
colormap: 4