Дронпоинт
Логика работы
Схема состояний и переходов между ними представлена на изображении:
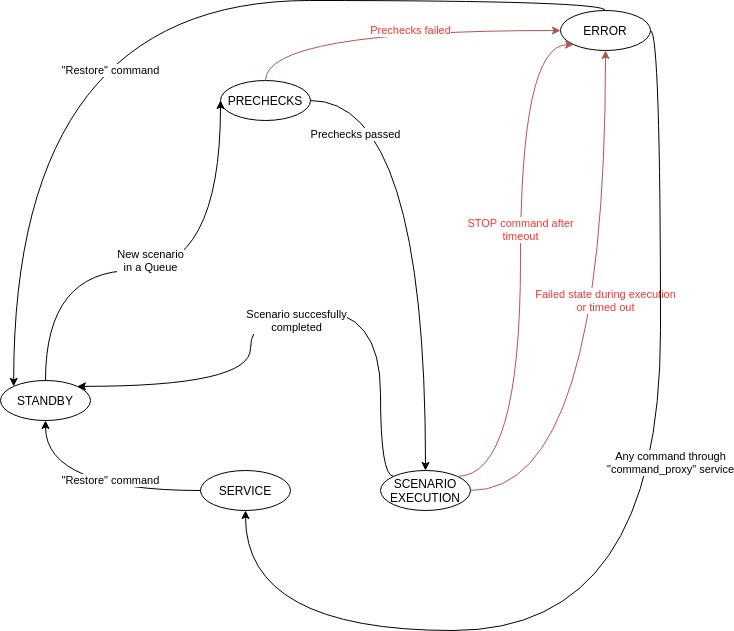
Описание алгоритма:
- При старте ноды Дронпоинта, (если все в порядке с оборудованием) она переходит в состояние STANDBY (ожидание новой команды).
- При получении команды на выполнение сценария, нода приступает к предварительным проверкам.
- В случае, если предварительные проверки не проходят, нода переходит в состояние ERROR.
- Если предварительные проверки проходят, нода переходит к выполнению сценария и меняет свой статус на соответствующий (например, LOADING_DRONE).
- Если во время выполнения сценария происходит ошибка (приходит ошибка от контроллера Дронпоинта, выходит тайм-аут на ожидание завершения команды), то нода переходит в состояние ERROR.
- После успешного завершения сценария нода перейдёт в состояние STANDBY.
- Во время выполнения сценария запросы на выполнение другого сценария будут отклоняться.
- Если нода в состоянии ERROR, то запросы на выполнение сценариев будут отклоняться.
- Сотояние ERROR - это повод изучить сообщения, пришедшие в QGC от ноды Дронпоинта и попытаться вручную исправить ситуацию.
- Для ручного управления дронпоинтом следует использовать режим SERVICE, позволяющий проксировать в контроллер низкоуровневые команды. Команды в этом режиме передаются как есть - нет никакого контроля их выполнения.
- После ручного исправления ошибочного состояния, следует вывести ноду из состояния ERROR командой RESET. Нода перейдёт в состояние STANDBY и будет готова снова выполнять сценарии.
- Во время выполнения любого сценария можно послать команду для экстренной остановки всех агрегатов - STOP.
Управление Дронпоинтом с помощью QGroundControl
Кастомизированную версию для управления Дронпоинтом можно скачать в релизах форка СОЕХ: https://github.com/CopterExpress/qgroundcontrol/releases/
Подключение
- Подключитесь к сети Дронпоинта (VPN или Wi-Fi).
- Создайте подключение в разделе Comm Links по нужному протоколу
Виджет переключения режимов
Виджет вызывается кликом на текущий режим:
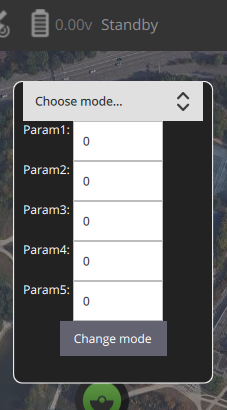
Виджет состоит из выпадающего списка режимов, текстовых полей для указания параметров режима и кнопки "Change mode", непосредственно отправляющей команду на смену режима.
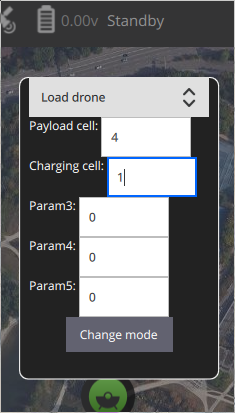
Режимы с параметрами
Некоторые режимы для своего выполнения требуют указания дополнительных параметров. Для удобства пользователя их названия появляются радом с полями ввода.
LOADING_DRONE, UNLOADING_DRONE
Для выполнения этого сценария необходимо указать ячейку для контейнера и зарядную ячейку для батареи:
Режим SERVICE
В этом режиме осуществляется безусловная передача низкоуровневых команд контроллеру Дронпоинта.
Замечание: Для осуществления передачи команд по протоколу MAVLink, возникла необходимость сопоставить команды определённым идентификаторам. Список идентификаторов можно посмотреть в коде ноды. При добавлении новых команд в код контроллера, для возможности их запуска из QGC необходимо добавить их в список с идентификаторами.
При выборе этого режима появляется выпадающий список, в котором можно выбрать команду - её id будет помещён в поле ввода первого параметра.
При выборе команды, для удобства пользователя, необходимые для неё параметры будут подписаны:
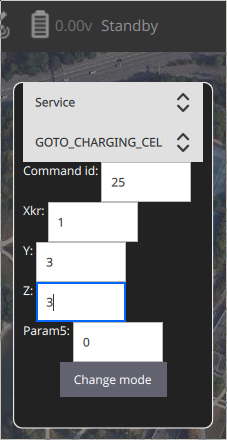
Замечание: Команды GOTO_CELL и GOTO_CHARGING_CELL пришлось сделать разными, так как несмотря на то, что контроллеру для их выполнения передаётся одна и та же команда
goto_cell, набор параметров у них отличается: координата Х передаётся как "х" в первом случае и как "Xkr" во втором.
Сценарии
Сценарий - это комплексная команда Дронпоинту, подразумевающая последовательное выполнение более простых команд.
Создание нового сценария
Сценарии хранятся в виде Python-словарей с определенным набором полей. Файл для хранения сценариев: https://github.com/CopterExpress/ros_cs/blob/dronepoint_standalone/cs_drivers/dronepoint_driver/scripts/dronepoint_driver/dronepoint_scenarios.py
На первом уровне словаря находятся следующие поля:
TestScenario = {
'name': 'TEST', # название сценария, которое будет выводиться в информационных сообщениях
'prechecks': {}, # предварительные проверки, которые должны быть осуществлены перед началом выполнения сценария
'commands': [] # список команд, которые должны быть выполнены в рамках сценария (при условии прохождения предварительных проверок)
}
Предварительные проверки (блок precheks)
Предвартельные проверки могут быть двух типов: проверки стейтов оборудования, присылаемых контроллером Дронпоинта (PrecheckTypes.UART_STATE), и проверки состояния внутреннего хранилища (PrecheckTypes.STORAGE_STATE) (например, глобальная проверка наличия свободных ячеек или проверка наличия заряженной батареи).
Блок предварительных проверок выглядит следующим образом:
'prechecks': {
PrecheckTypes.UART_STATE: {
ArduinoDriverStateKey.TOP_HATCH: ArduinoTopHatchDriverState.CLOSED,
ArduinoDriverStateKey.PLATFORM_PAYLOAD: ArduinoPlatformPayloadDriverState.EMPTY,
ArduinoDriverStateKey.CHARGING_CELL: ChargingCellState.EMPTY,
},
PrecheckTypes.STORAGE_STATE: {
'state': 'empty'
}
},
"Ключи" словаря предварительных проверок UART_STATE - ключи стейтов, приходящих от контроллера Дронпоинта. Их можно найти в коде основной логики ноды Дронпоинта (https://github.com/CopterExpress/ros_cs/blob/dronepoint_standalone/cs_drivers/dronepoint_driver/scripts/dronepoint_driver/dronepoint_driver_node.py) в структуре ArduinoDriverStateKey:
class ArduinoDriverStateKey(object):
"""
Namespace for the status message keys which came from Arduino UART.
"""
LID = 'statelid' # DriverState message charging station lid state key
LOCK = 'statelock' # DriverState message charging station lock state key
PLATFORM = 'platform_state' # Main platform state
Z_AXIS_STATE = 'StatusZ' # Axises states
X_AXIS_STATE = 'StatusX'
Y_FLAG_STATE = 'YFlag' # StatusY will not be actually changed during "GOTO_CELL" platform moving
Y_AXIS_STATE = 'StatusY' # Actual Y position of the platform
# State of platform payload detectors (whether payload is on the platform or not)
PLATFORM_PAYLOAD = 'platform_payload_state'
# State of magnets which hold the payload on platform
PLATFORM_PAYLOAD_LOCK = "platform_payload_lock_state"
TOP_HATCH = 'top_hatch_state' # Top hatch (drone loading) state
BOTTOM_HATCH = 'bottom_hatch_state' # Bottom hatch (user loading) state
# State of lock which holds container while user interoperates with payload
USER_CELL_LOCK = 'user_cell_lock_state'
CHARGING_CELL = 'chargingKR1_cells_states' # State of charging cell (just one at the moment)
SCALES = 'scales_state' # Weight measuring instrument state
LAST_COMMAND = 'last_command' # Feedback from the Dronepoint about the last command
"Значения" словаря - конкретные ожидаемые значения указанных выше стейтов. Алиасы значений можно посмотреть в структурах, описывающих множество значений конкретного устройства. Например, так выглядит структура для верхнего люка:
class ArduinoTopHatchDriverState:
"""
Namespace for top (drone) hatch states.
"""
OPEN = 'open'
CLOSED = 'close'
Предварительные проверки хранилища (STORAGE_STATE) - задел на будущее, этот функционал пока не реализован.
Команды (блок commands)
Блок команд - непосредственно "тело" сценария, его основной функционал. Примерный вид блока:
{
'type': ScenarioCommandTypes.SEND_UART,
'command': ArduinoCommand.GOTO_CELL,
'cell_type': CellTypes.CHARGING,
# 'cell_coordinates': {'x': 2, 'z': 9, 'y': 3},
'timeout': 15,
'pending_states': {
ArduinoDriverStateKey.PLATFORM: ArduinoPlatformDriverState.ON_CELL
},
}
Поле type. Тип команды
Типы команд описываются следующей структутрой:
class ScenarioCommandTypes:
"""
Types of commands in scenarios
"""
SEND_UART = 0 # Send command to dronepoint and wait for states or timeout (default)
SLEEP = 1 # Wait for some time
GET_INFO = 2 # Request for something (DB or Mavlink, for example)
- SEND_UART - Команда будет отправляться непосредственно на контроллер через порт. Подавляющее большинство команд имеют именно этот тип.
- SLEEP - Команда, предписывающая "подождать" указанное количество секунд. Например, для ожидания действий пользователя с контейнером.
- GET_INFO - Получить сведения из внутреннего хранилища. Задел на будущее, пока не реализован.
Поле command. Команда для выполнения
Текущий список поддерживаемых команд можно посмотреть в структуре ArduinoCommand:
class ArduinoCommand(object):
"""
Namespace for the Arduino commands.
"""
# Lid commands
LID_OPEN = 'open' # Open charging station lid
LID_CLOSE = 'close' # Close charging station lid
LID_STOP = 'stop' # Stop lid motor
# Lock commands
LOCK_RELEASE = 'uncentr' # Release charging station lock
LOCK_LOCK = 'centr' # Lock charging station lock
LOCK_STOP = 'stopcentr' # Stop lock motor
# Platform commands
OPEN_TOP_HATCH = 'top_hatch_state_removing'
CLOSE_TOP_HATCH = 'top_hatch_state_install'
GOTO_TOP_HATCH = 'goto_top_hatch'
GOTO_CELL = 'goto_cell'
LOAD_CHARGING_CELL = 'chargingKR1_cover_install'
UNLOAD_CHARGING_CELL = 'chargingKR1_cover_removing'
LOAD_PAYLOAD_CELL = 'loadingCELL'
UNLOAD_PAYLOAD_CELL = 'unloadingCELL'
GET_FROM_USER = 'get_from_user'
UNLOAD_TO_USER = 'unload_to_user'
PARK_PLATFORM = 'park_platform'
STOP = 'stopALL'
# Drone and payload
GET_PAYLOAD_FROM_DRONE = 'container_removing'
INSERT_PAYLOAD_INTO_DRONE = 'container_insert'
# Platform payload lock commands
LOCK_PAYLOAD = 'lock_payload'
RELEASE_PAYLOAD = 'release_payload'
# Charging cell commands
LOCK_CHARGING_CELL_LOCK = 'lock_charging_cell_lock'
RELEASE_CHARGING_CELL_LOCK = 'release_charging_cell_lock'
# Top hatch locking mechanizm commands
LOCK_TOP_HATCH_LOCK = 'lock_top_hatch_lock'
RELEASE_TOP_HATCH_LOCK = 'release_top_hatch_lock'
# Bottom hatch commands
OPEN_BOTTOM_HATCH = 'hatch_delivery_open'
CLOSE_BOTTOM_HATCH = 'hatch_delivery_close'
# User cell locking mechanizm commands
LOCK_USER_CELL_LOCK = 'lock_user_cell_lock'
RELEASE_USER_CELL_LOCK = 'release_user_cell_lock'
Поля для команды goto_cell
Для команды goto_cell предусмотрено два вида поведения:
- Если указан тип ячейки (
cell_type), то координаты ячейки будут браться из внутреннего хранилища (файл cells_states.json) - Если указаны непосредственно координаты ячейки (
cell_coordinates), то в команду будут переданы именно они.
Поле timeout
В этом поле указывается время в секундах ожидания выполнения команды. Если в указанное время команда не выполнилась, нода выдаёт сообщение об ошибке и переходит в стейт ERROR.
Поле pending_states (ожидаемые состояния)
Аналогично пречекам стейтов контроллера. В этом поле указываются ожидаемые стейты, означающие выполнение команды. Например, при открытии верхнего люка успешным выполнением можно считать:
ArduinoDriverStateKey.TOP_HATCH: ArduinoTopHatchDriverState.OPEN- стейт верхнего люка в состоянии ОТКРЫТArduinoDriverStateKey.PLATFORM_PAYLOAD: ArduinoPlatformPayloadDriverState.EMPTY- датчик нагрузки на платформе в состоянии ПУСТОЙ