Настройка соединения Pelican Mini - COEX Control Module
Запись образа
-
Загрузите последние образы NavTALink для коптера и NavTALink control для пульта.
-
Запишите образ NavTALink на MicroSD карту и установите в Raspberry Pi на дроне.
Info Для записи можно использовать приложение balenaEtcher.
-
Запишите образ NavTALink control на MicroSD и установите в Raspberry Pi в пульте.
Info Образы изначально преднастроены и должны связываться сразу, для большей безопасности соединения рекомендуется изменить ключи шифрования.
Настройка образа дрона Pelican Mini
Hint Все нижеприведенные команды являются командами консоли, для выполнения вышеописанных действий.
-
Включите Raspberry Pi дрона. После инициализации образа появится WiFi сеть с именем NavTALink-0586 подключитесь к ней, стандартный пароль navtalinkwifi.
-
Подключитесь к системе по IP:
192.168.30.1. Для подключения используйте любой SSH клиент. Пошаговую инструкцию о подключении с помощью Windows можно прочитать тут. -
Сгенерируйте ключи шифрования используя команду:
bash wfb_keygen -
В результате выполнения команды, в домашней директории
/home/pi/появятся 2 файла ключейgs.keyиdrone.key, для станции управления и дрона соответственно.
-
Перейдите в домашнюю директорию и перенесите ключ шифрования дрона
drone.keyв директорию/etc/командой:bash cd ~/ sudo cp grone.key /etc/ -
Вызовите команду записи идентификационного номера сетевого адаптера:
bash sudo navtalink_update_adapter -
Загрузите ключ шифрования станции управления
gs.keyна компьютер. Для этого используйте любой SFTP клиент или сделайте это вручную, подключив MicroSD карточку к компьютеру. -
Удалите ключи шифрования оставшиеся на дроне:
bash rm *.key
Настройка образа пульта COEX Control Module
-
Подключите MicroSD карточку пульта к компьютеру и перенесите ключ
gs.keyв директориюetc/. -
Установите MicroSD карточку в пульт и включите его.
-
Откройте консоль в верхнем левом углу панели задач.
-
Вызовите команду записи идентификационного номера сетевого адаптера:
bash sudo navtalink_update_adapter
Изменение имени сети
Hint Рекомендуется изменять имя сети раздаваемого WiFi для возможности включения двух дронов в 1 месте.
-
Отредактируйте файл
/etc/wpa_suplicant/wpa_suplicant-wlan0:bash sudo nano /etc/wpa_suplicant/wpa_suplicant-wlan0 -
Измените имя WiFi смети, заменив поле
ssidна любое другое имя, к примеру NavTALink-1234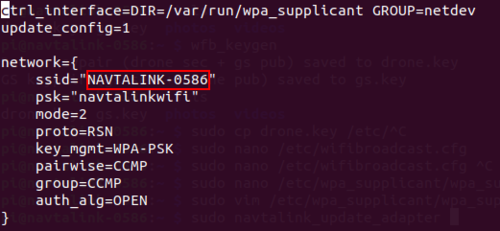
Изменение частоты подключения адаптера
Hint По умолчанию образы настроены на один и тот же канал WiFi, для одновременной работы двух дронов и пультов в 1 месте необходимо разнести их по разным каналам.
-
Отредактируйте файл
/etc/wifibroadcast.cfg:bash sudo nano /etc/wpa_suplicant/wpa_suplicant-wlan0 -
Измените в нем параметр
wifi_channel.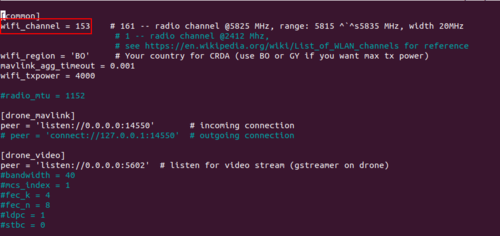
Caution Данную настроку необходимо проводить на дроне и на пульте.
Калибровка термального изображения
-
Для совмещения визуального и термального изображения отредактируйте файл
/etc/duocam/camera.yaml.bash sudo nano /etc/duocam/camera.yamlHint Для применения внесенных изменений перезагрузите сервис duocam-camera, введя строку
sudo systemctl restart duocam-camera. -
Для настройки положения термального изображения измените параметры
x_startиy_startв блокеoverlay_thermal_on_visual. Данные параметры отвечают за горизонтальное и вертикальное положение термального изображения, слева на право и сверху вниз соответственно. -
Для настройки температуры отображаемой на изображении, измените параметр
offsetв блокеtemperature_calibration. Для повышения температуры измените параметр на необходимое количество градусов в большую сторону, а для уменьшения в меньшую.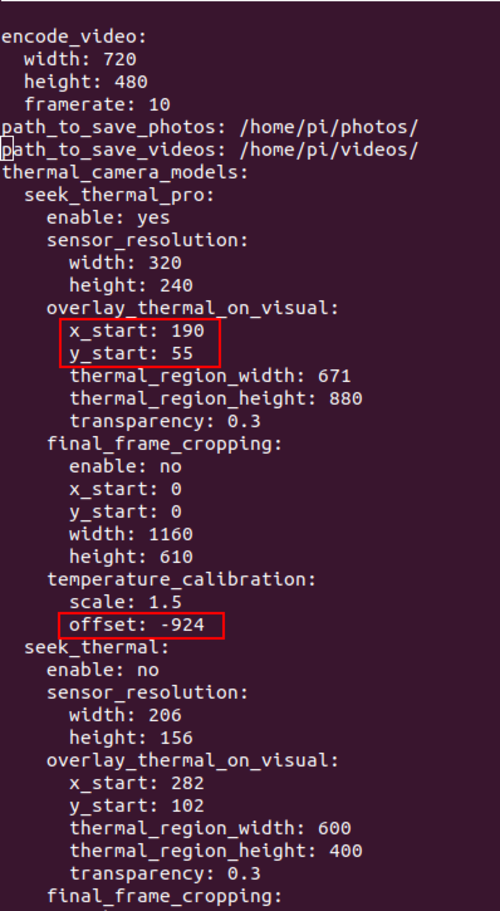
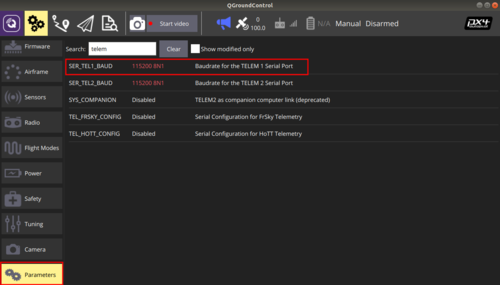
Настройка полетного контроллера
Скачайте последнюю версию прошивки charging_station_1.9.2, в репозитории https://github.com/CopterExpress/Firmware.
Последний выпущенный релиз v1.9.2-charging-station.4.
-
Установите прошивку на дрон.
-
Во вкладке Parameters найдите параметр SER_TEL1_BAUD и установите скорость передачи 115200.